19.2. 功能特性¶
19.2.1. 主要特性¶
支持单线 SPI 接口
可编程的时钟极性和相位
AHB 总线接口,数据总线位宽 32 位,支持配置 8 / 32 bit 数据位宽传输
TX FIFO 深度为 16×32bit ,RX FIFO 深度为 8×32bit
支持主机模式和从机模式
作为主机 (master) 时,支持最多1个 cs 控制接口,可用于控制一个 slave
支持 DMA 控制器接口,使用握手接口实现传输请求,通过总线与 DMA 控制器连接
主机模式下,接收到的串行数据位 (RXD) 的采样时间延时可编程,从而实现更高的串行数据比特率
从机模式下,从机只接收数据时,支持无 cs 信号模式,cs 信号可由内部软件控制一直拉低
19.2.2. 功能描述¶
19.2.2.1. SPI 引脚连接如下:¶
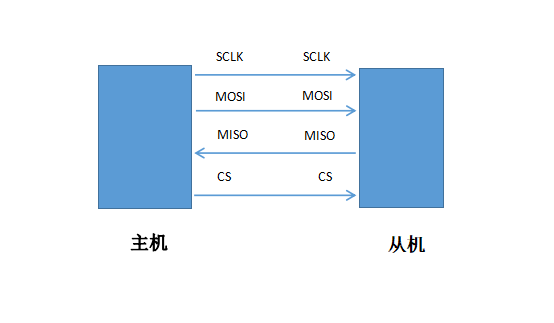
SPI (Standard-SPI) 采用 4 个引脚与外部器件相连:
MISO:主设备输入/从设备输出引脚。该引脚在从模式下发送数据,在主模式下接收数据。
MOSI:主设备输出/从设备输入引脚。该引脚在主模式下发送数据,在从模式下接收数据。
CLK:串口时钟,作为主设备的输出,从设备的输入。
CS:从设备选择。这是一个可选的引脚,用来选择主/从设备。它的功能是用来作为“片选引脚”,让主设备可以单独地与特定从设备通讯,避免数据线上的冲突。
19.2.2.2. 时钟信号的相位和极性¶
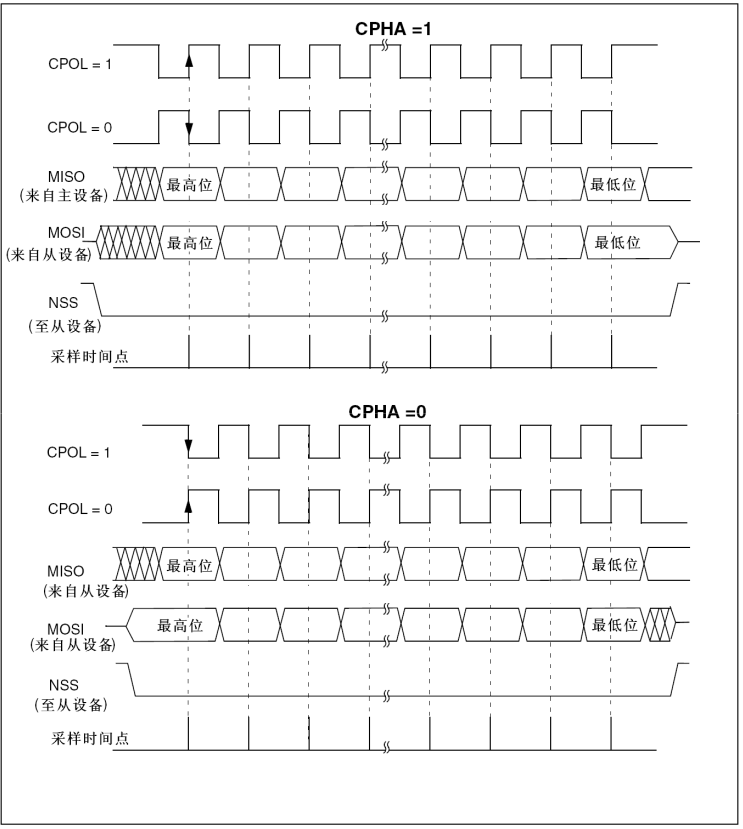
主机可以配置与数据有关的时钟极性和相位。Motorola 将这两个选项分别命名为 CPOL 和 CPHA (用于时钟极性和相位),时序图如上所示:
CPOL 确定时钟的极性:
CPOL = 0 时,SCK 引脚在空闲状态保持低电平
CPOL = 1 时,SCK 引脚在空闲状态保持高电平
CPHA 确定时钟的采样边沿:
CPHA = 0 时,SCK 时钟的第一个边沿进行数据位采样,数据在第一个时钟边沿被锁存
CPHA = 1 时,SCK 时钟的第二个边沿进行数据位采样,数据在第二个时钟边沿被锁存